Step System
오픈 루프 시스템
-
-
Step System
STAC Series
STAC는 내장 모션 컨트롤러가 통합된 고성능 스탭모터 드라이브입니다
다양한 통신방식으로 실시간 제어할수 있습니다. AC 전원사용
공진 방지
마이크로스텝 에뮬레이션
토크 리플 평활화
Stall 감지 및 Stall 방지
AC 전원사용
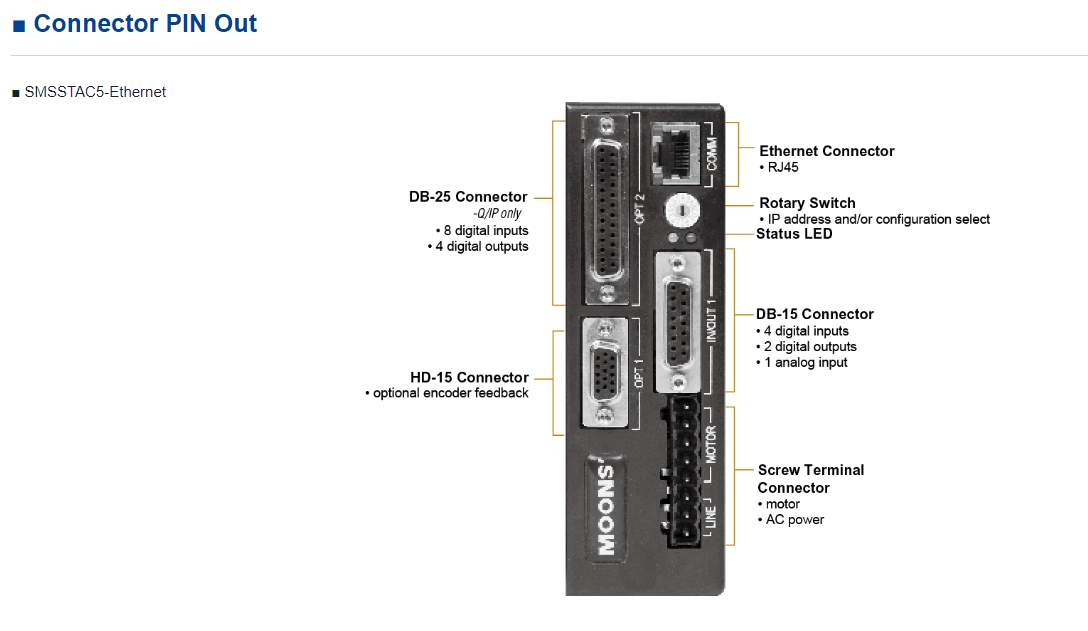
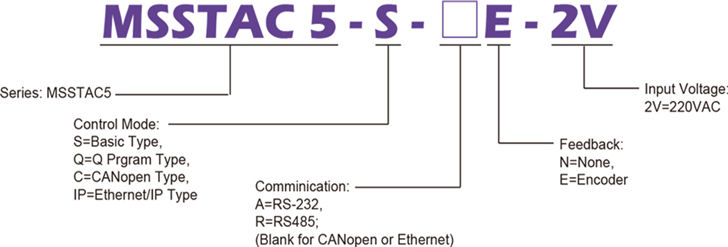
종류 MSSTAC 5
■ 특징
STAC 시리즈는 다양한 제어 옵션과 정교한 기능을 갖춘 고성능 스텝모더 드라이브입니다.
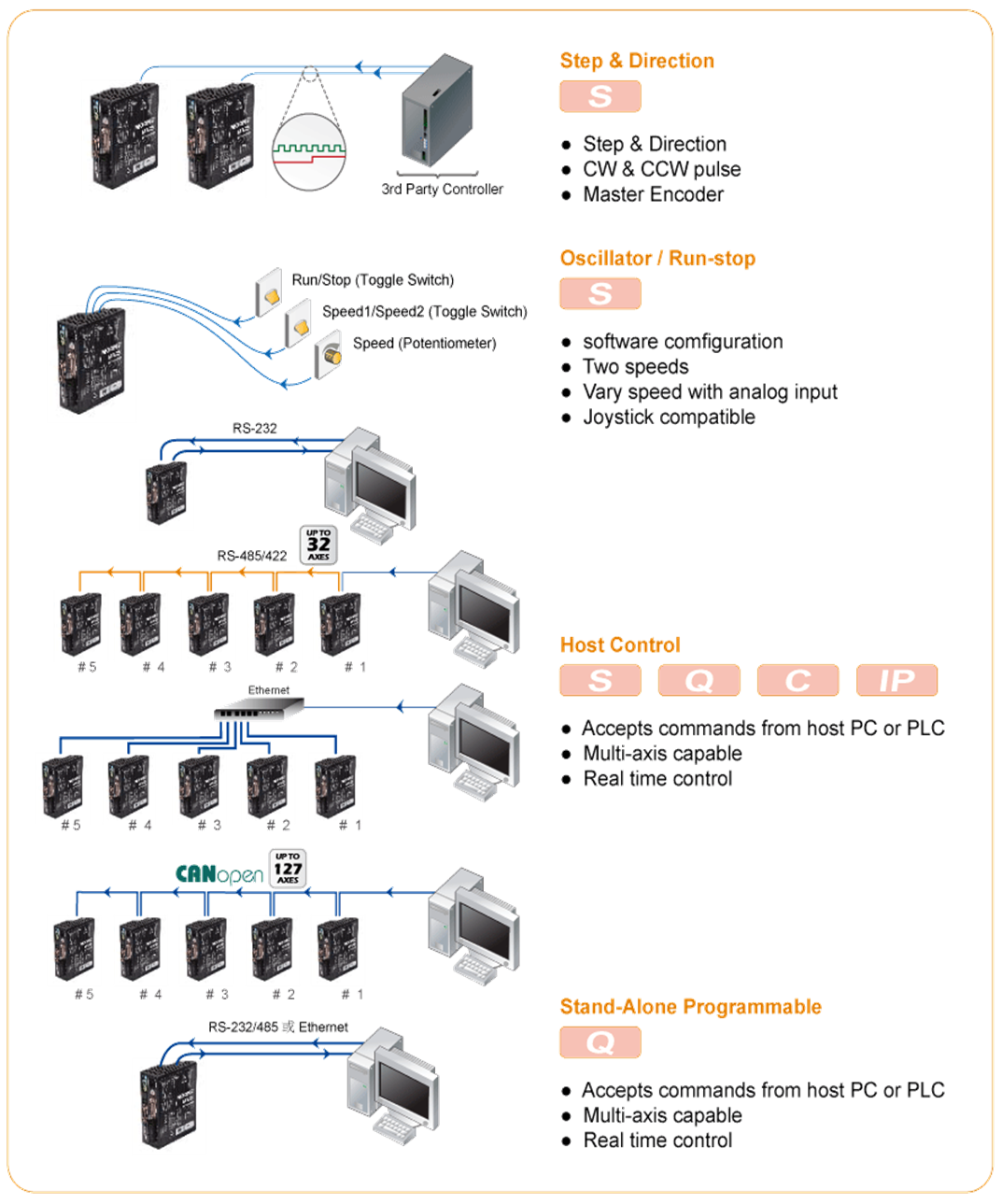
전류 제어 기능을 통해 고속회전 및 부드러운 동작이 가능합니다. 다중 제어 옵션을 통해 ST 시리즈는 독립 실행형 제어모드
Q 프로그래밍과 RS-232/485, 이더넷 UDP/TCP, CANopen 및 이더넷/IP와 같은 다양한 산업 필드 버스 제어를 지원합니다.
■ 반공진
-더 나은 모터 성능과 더 빠른 속도 제공
스텝 모터는 특정 속도에서 공진(진동)할수 있는데 ST 드라이브는 자동으로 시스템의 고유 공진 주파수를 계산하고
제어 알고리즘에 댐핑을 적용하여 진동을 상쇄시킵니다. 이를 통해 중간속도구간의 안정성을 크게 향상시키고 더 빠른속도와
더 큰 토크 활용을 가능하게 합니다. 또한 시스템안정화에 소요되는 세팅시간을 단축합니다.
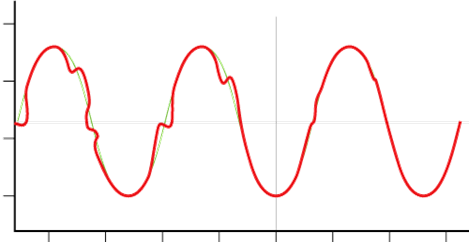
■ 토크 리플 스무딩
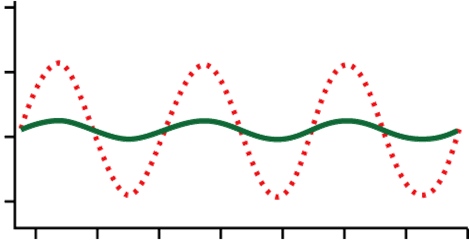
- 저속 주행 시 보다 부드러운 모션
스텝 모터에는 모터의 모션 프로파일에 영향을 줄 수 있는 저속구간에서 고유한 토크 리플이 있습니다.
이 토크 리플을 분석하여 시스템이 이효과를 감쇄시키는 반대의 고주파를 적용함으로써 부드러운 모션을 가능케 합니다.
■ 마이크로스텝 에뮬레이션
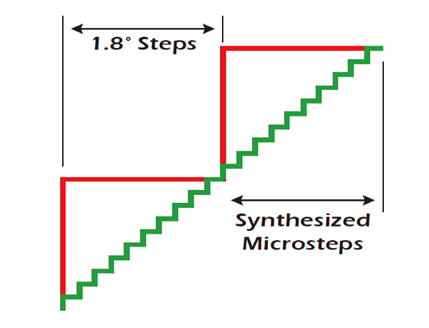
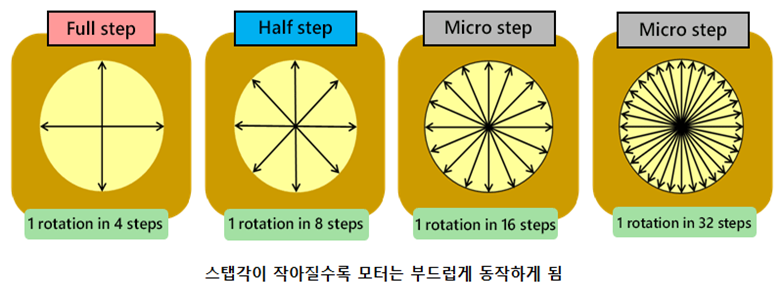
Microstep Emulation을 사용하면 저해상도 시스템을 좀더 부드럽게 .동작시킬수 있습니다. 드라이브에서 저해상도 스텝 펄스를
좀더 미세화 하여 부드러운 모션을 가능하게 합니다
■ 명령 신호 스무딩
명령 신호 스무딩은 속도와 방향의 급격한 변화를 부드럽게 처리하여 모터의 움직임의 불안정성을 낮춥니다.
이로인해 급격한 동작으로 발생할수 있는 기계 부품의 마모를 줄일수 있습니다.
■ 자동 설정 및 자체 테스트
시동 시 드라이브는 저항 및 인덕턴스를 포함한 모터 파라메타를 측정한 다음 이 정보를 사용하여 시스템 성능을 최적화합니다.
추가적으로 드라이브는 전원의 Open과 Short를 감지할 수 있습니다
■ Control Options
■ 넘버링 시스템
| Power Amplifier | |
| Amplifier Type | Dual H-Bridge, 4 Quadrant |
| Current Control | 4 state PWM at 16 KHz |
| Output Torque | 0.5-2.55A/Phase(peak of sine) in increments of 0.01A |
| Input Voltage | Signal Phase 94-265VAC |
| Protection | Over-voltage, under-voltage, over-temp, internal motor shorts (phase-to-phase, phase-to-ground) |
| Regeneration | Built-in regeneration circuit, 10 watts max. |
| Idle Current | Automatic idle current reduction to reduce heat after motor stops moving, software selectable current and idle delay |
| Microstep Resolution | Software selectable from 200 to 51200 steps/rev in increments of 2 steps/rev |
| Microstep Emulation | Switch selectable microstep emulation provides smoother, more reliable motion |
| Anti-Resonance | Raises the system-damping ratio to eliminate midrange instability and allow stable operation throughout the speed range of the motor, dip switch selectable load inertia |
| Torque Ripple Smoothing | Allows for fine adjustment of phase current waveform harmonic content to reduce low-speed torque ripple in the range of 0.25 to 1.5 rps |
| Encoder Feedback | Optional encoder feedback for stall detection and stall prevention |
| NonVolatile Storage | Configurations are saved in FLASH memory on-board the DSP |
| Humidity | 90% non-condensing |
| Ambient Temperature | 0 - 40°C when mounted to a suitable heat sink |
| Mass | Approx. 0.68Kg |
| All models | X1, X2 inputs: Optically isolated, differential, 5-24 VDC, minimum pulse width = 250 ns, maximum pulse frequency = 2 MHz |
| X3, X4 inputs: Optically isolated, differential, 5-24 VDC | |
| Y1, Y2 outputs: Optical darlington, sinking or sourcing, 30 VDC max, 100 mA max | |
| Analog input: Single-ended. Range is software selectable 0-5, +/-5, 0-10, or +/-10 VDC. Software configurable offset, deadband and filtering. | |
| Resolution is 12 bits (+/- 10 volt range), 11 bits (+/-5 or 1-10 volt range) or 10 bits (0-5 volt range). | |
| Expanded I/O | -Q-A models have the same I/O as above plus the following: |
| IN1, IN2, IN7, IN8 inputs: Optically isolated, differential, 5-24 VDC logic (2.5V switching threshold), | |
| 100 usec minimum pulse width, maximum current = 10 mA. | |
| IN3-IN6 inputs: Optically isolated, single-ended, shared common, sinking or sourcing, | |
| 12-24 VDC logic, 2200 ohms, maximum current = 10 mA. | |
| OUT1-OUT3 outputs: Optical darlington, single-ended, shared, sinking, 30VDC max, 100 mA max, | |
| voltage drop = 1.2V max at 100 mA. | |
| OUT4 output: Optical darlington, sinking or sourcing, 30 VDC max, 100 mA max, voltage drop = 1.2V max at 100 mA. | |
N/A