Step Motor
2상, 3상 스텝모터, Full Step. Half Step
-
-
Step Motor
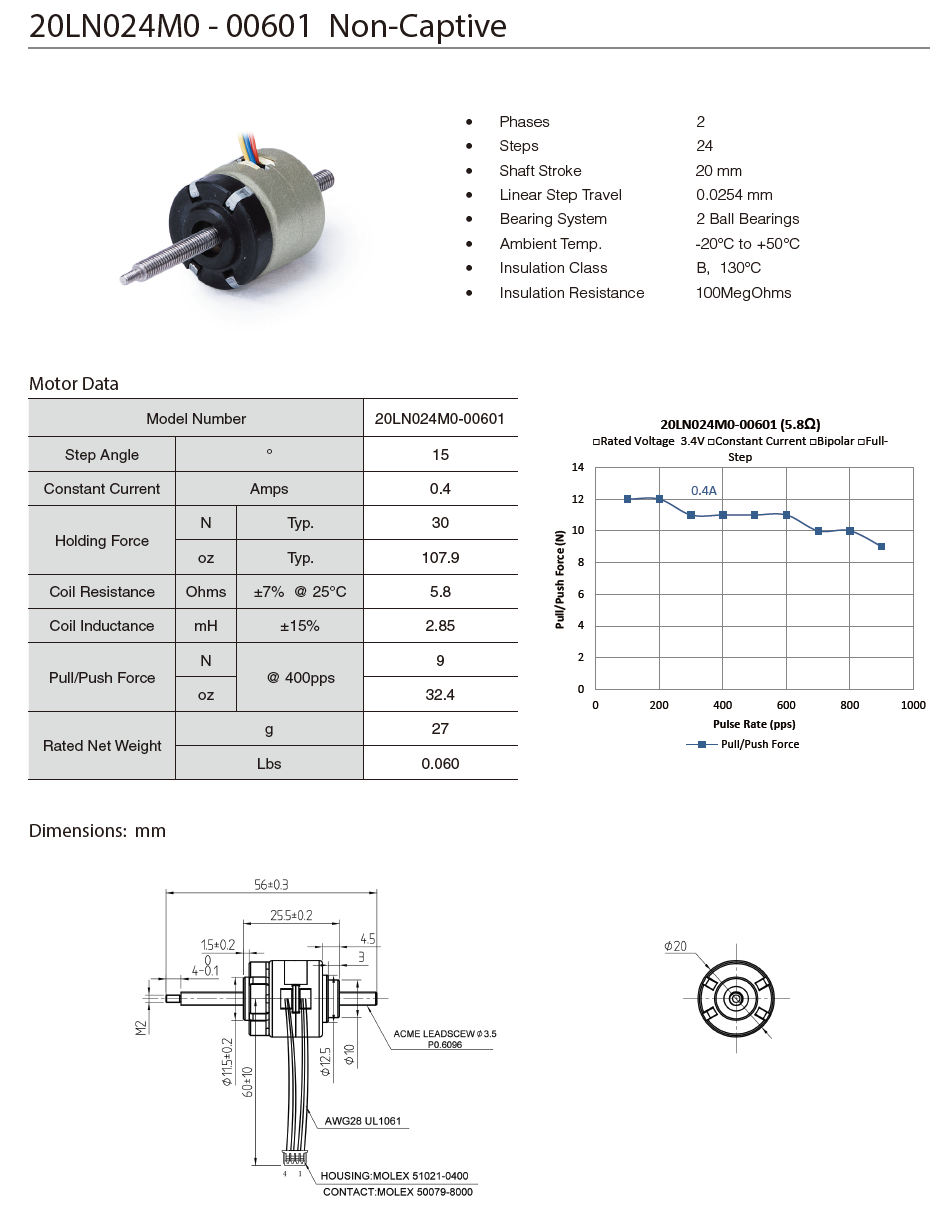
PM Actuator
PM 리니어모터로 다양한 사이즈가 있습니다.
Small Size 2상이며 스텝각도는 3.75도, 7.5도, 15도 또는 18도등입니다.
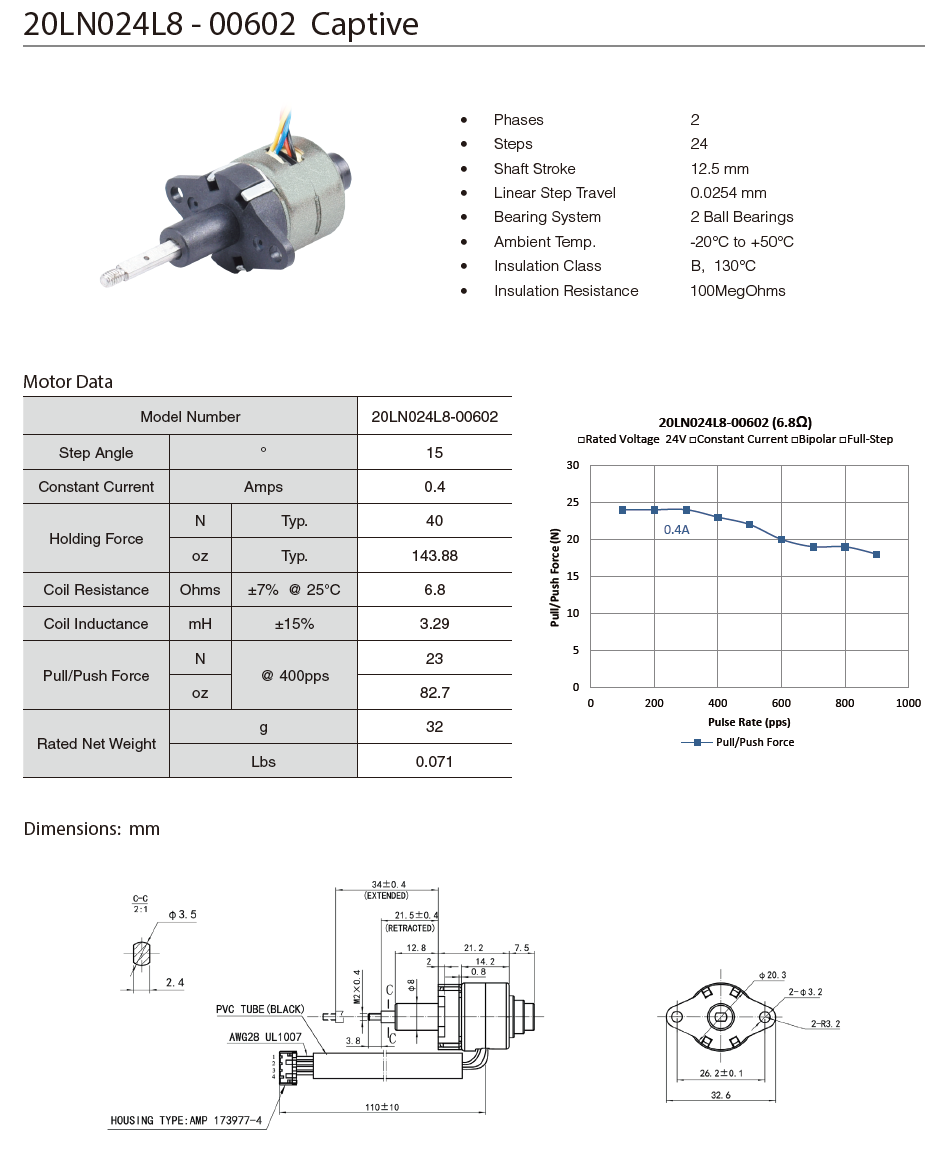
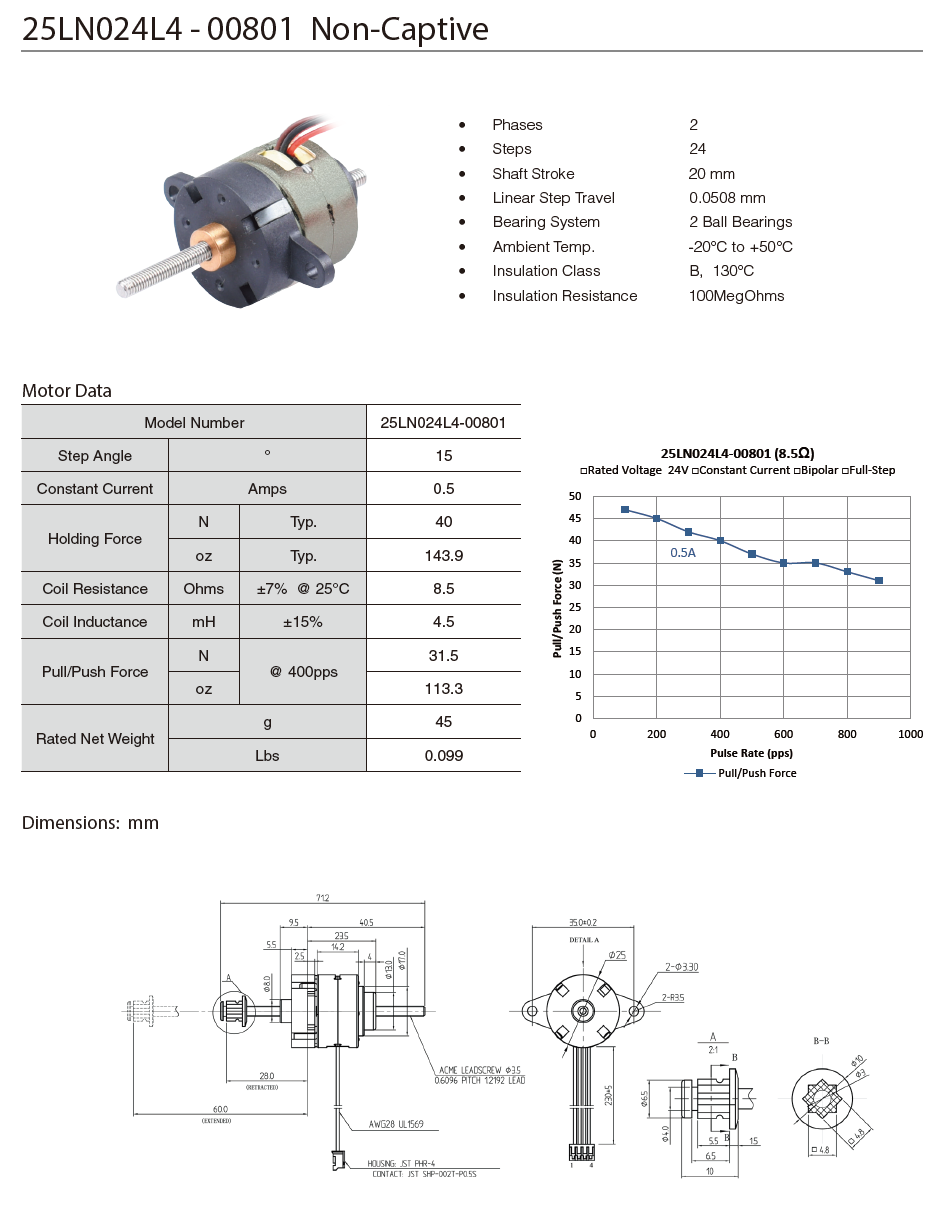
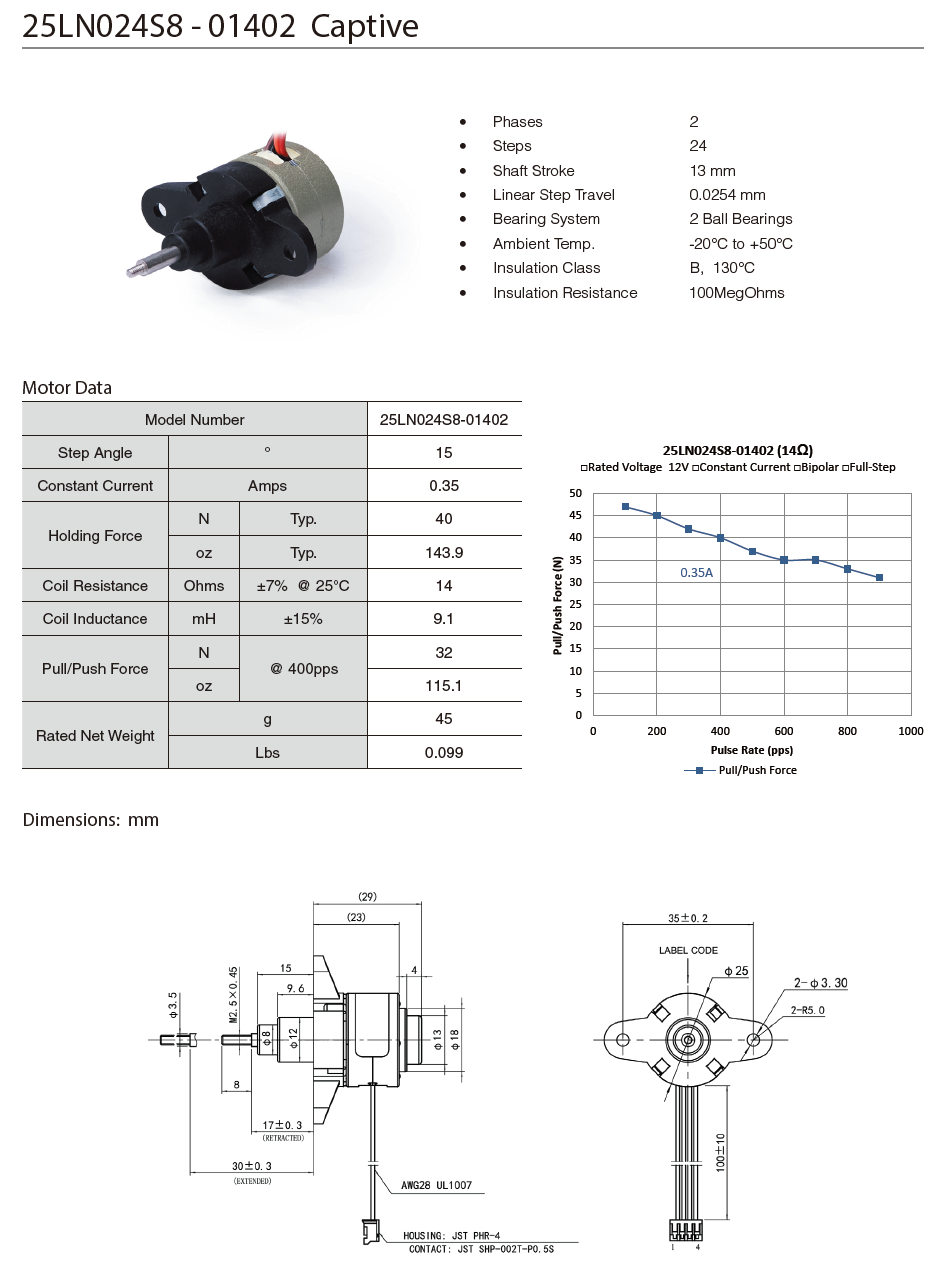
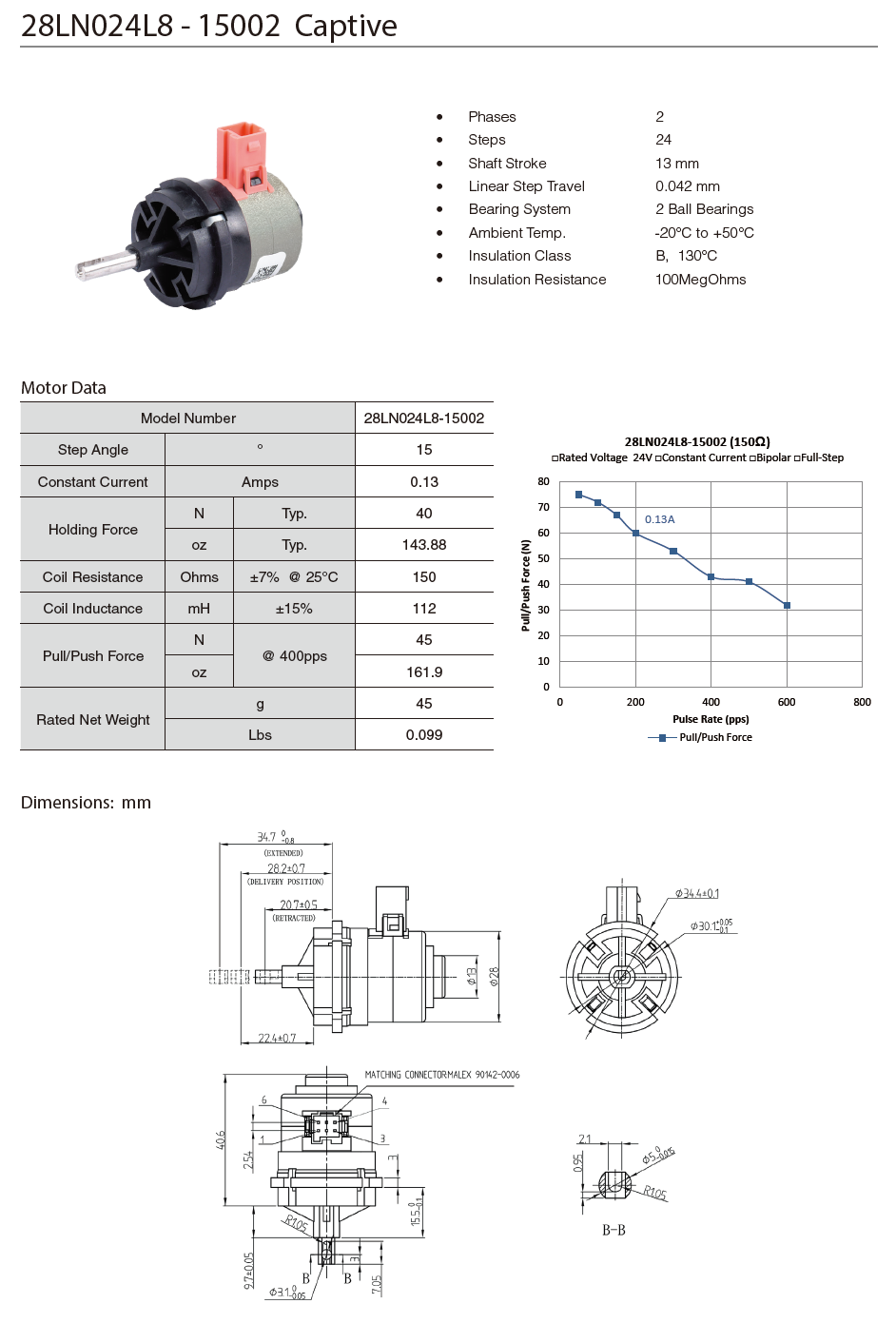
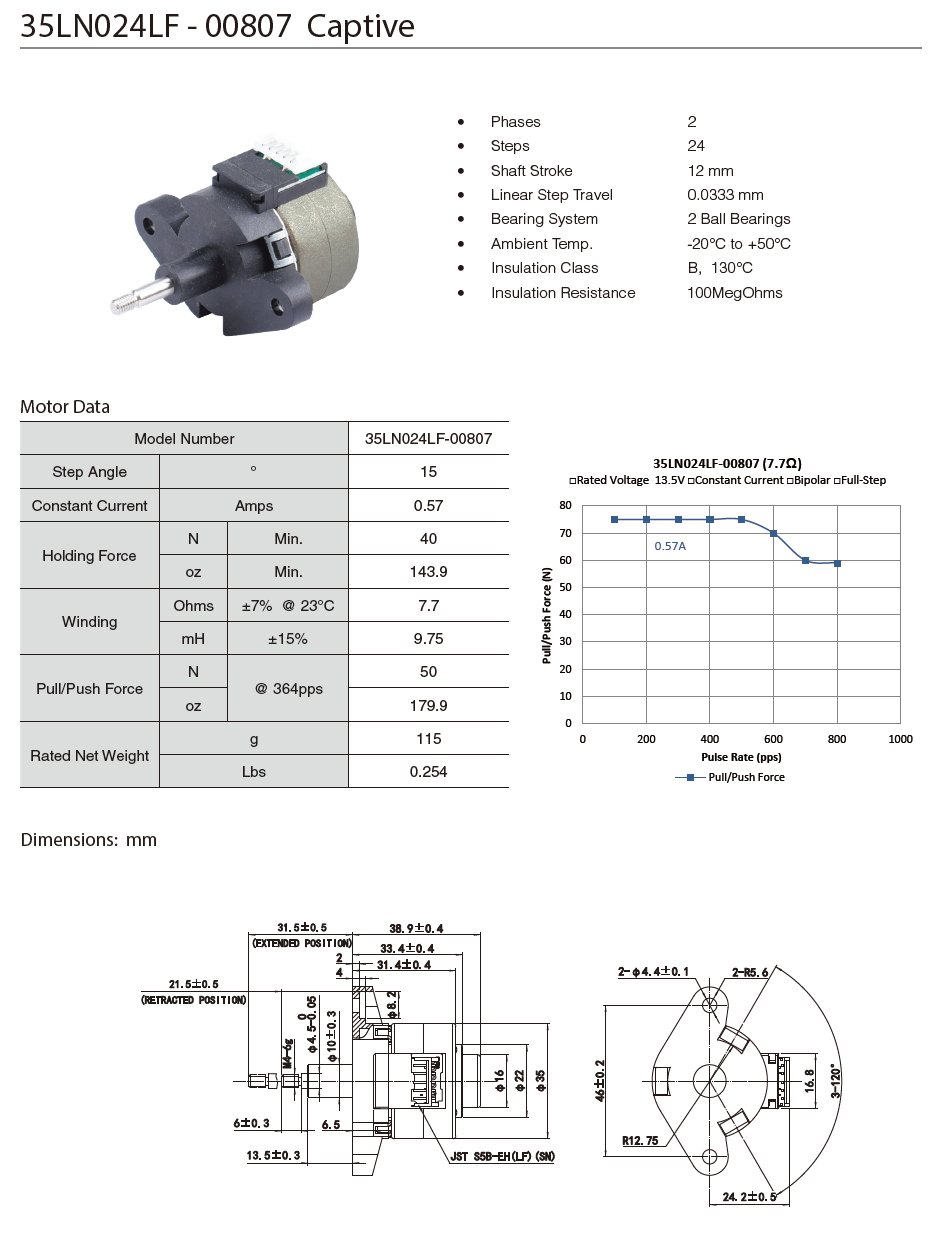
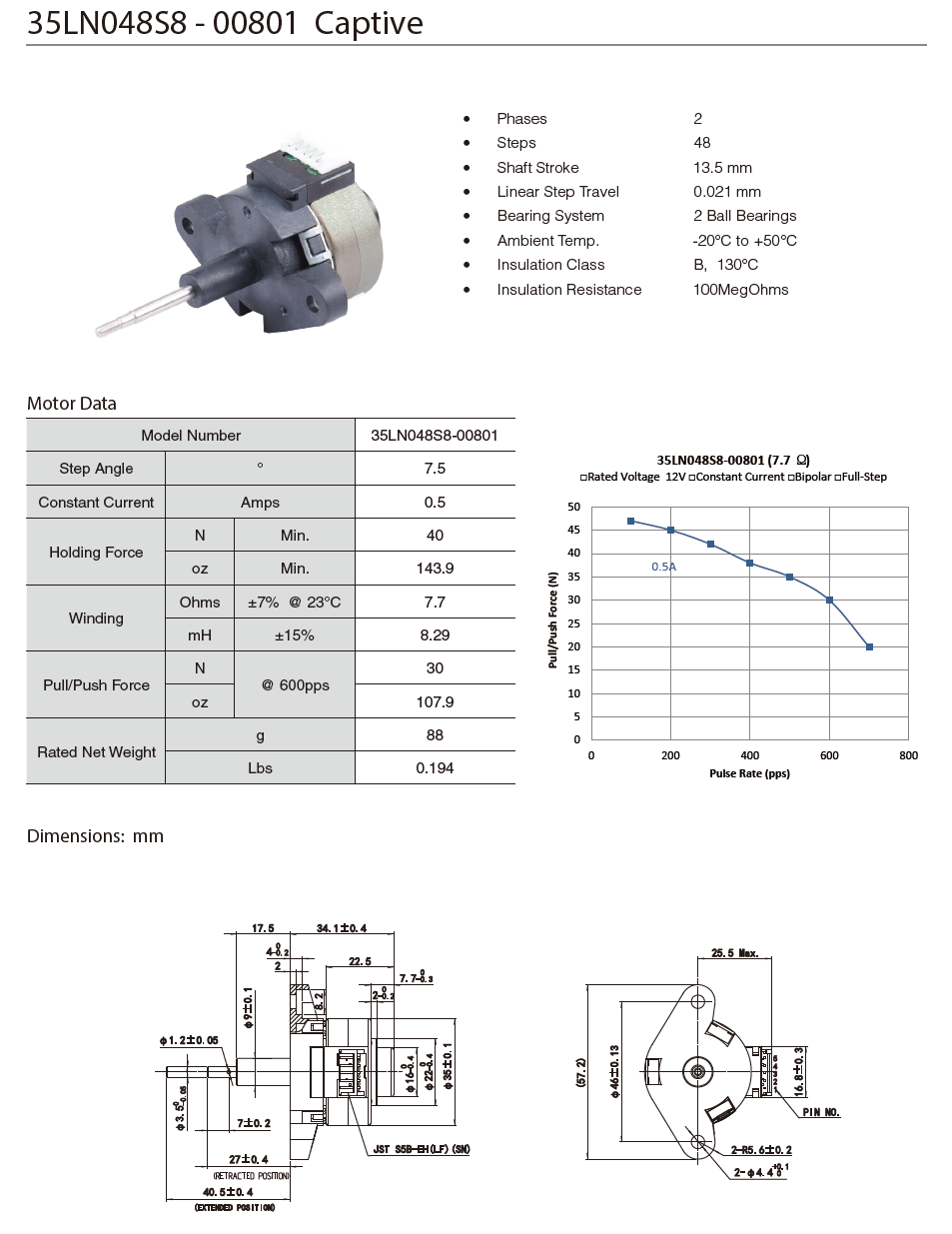
2상
사프트 스트로크 12mm ~ 50mm
스텝별 이동: 0.0333mm ~ 0.0508mm
RoHS 준수
종류 PM Actuator
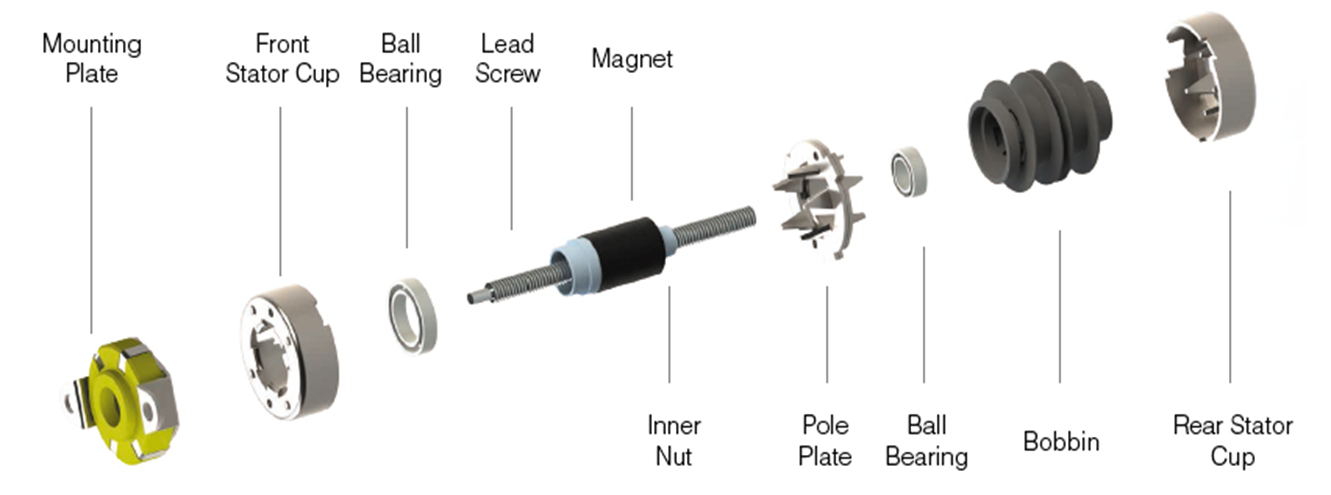
PM 스탭 모터는 회전자에 영구 자석(PM)을 사용하고 회전자 PM과 고정자 전자석 사이의 인력 또는 반발력으로 작동합니다.
PM 스탭모터는 일반적으로 토크와 부피가 작은 2상이며 스텝 각도는 일반적으로 3.75도, 7.5도, 15도 또는 18도 등입니다.
MOONS의 PM 스탭 모터는 컴퓨터 장비, 사진 시스템, 광전자 장치, 밸브 제어, ATM 장비, CNC 기계, 자동 권선기, 전자 시계
및 의료 장비 포함한 많은 혁신적인 응용 분야에 널리 적용됩니다.
■ 구조
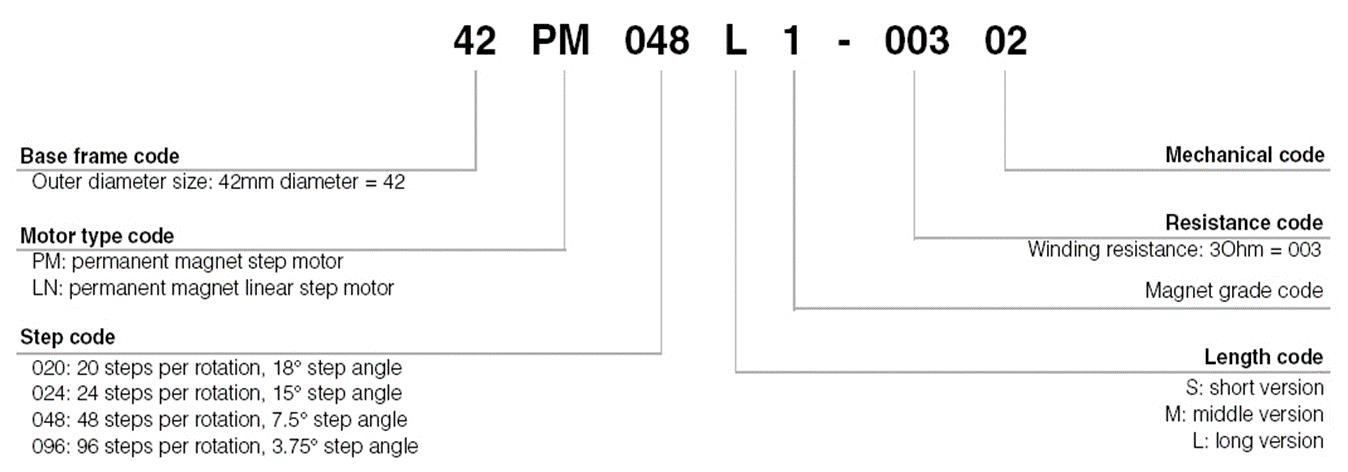
■ 넘버링 시스템

n/a
N/A
■ 모터의 속도-토크 특성
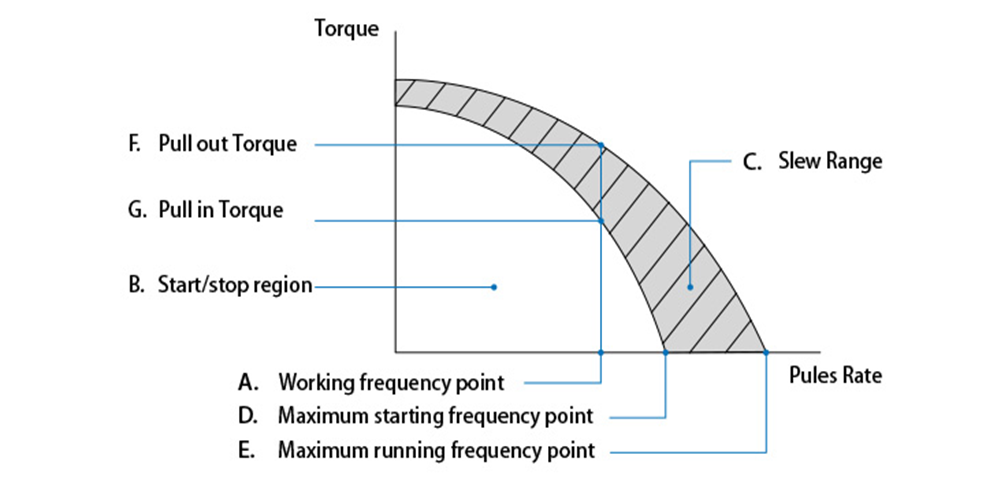
A : 작동 주파수 포인트는 드라이브의 펄스 속도 대비 스테핑 모터 회전 속도를 표현 합니다.
n = q * Hz / (360 * D)
n : 회전/초 (RPS)
Hz : 주파수 값 또는 드라이버 펄스 속도.
D : 모터 드라이브의 분해능비율 (마이크로스텝이 8000일경우 8000/200 = 40)
q : 스테핑 모터의 스텝 각도 (통상 1.8도)
B : 시작/정지 영역: 스테핑 모터가 가감속시가 지정하지 않고 바로 지정된속도로 운전하거나
바로 정지시킬수 있는 토크영역 (가감속시간설정시 C구간까지 확장가능)
C : Slew range : 가감속시간을 줌으로 B 토크영역보다 더 확장된 토크영역을 사용가능
이영역(Slew range)에서 필히 가감속시간이 있어야 되며, 바로지정된속도로 운전하거나 바로 정지시킬수 없음
D : 최대 시작 주파수 포인트. 스테핑 모터는 무부하 상태에서 최대 시작속도로 동작가능.
E : 최대 주행 주파수 포인트. 스테핑 모터는 무부하 상태에서 최대 주행속도로 동작가능.
F : 풀 아웃 토크(PULL OUT TOQUE) : 회전을 시작한(가속시간을 가진) 후 특정 동작 주파수
(회전속도)로 회전할수 있는 최대 다이나믹 토크 값
풀 아웃 토크의 회전 관성 때문에 항상 풀 인 토크 보다 큼 (Pull out torque > Pull in torque)
G : 풀 인 토크(PULL IN TORUQE) : 정지상태에서 특정 동작 주파수 (회전속도)로 바로 회전할수있는(가감속시간없이 운전) 최대 다이나믹 토크 값
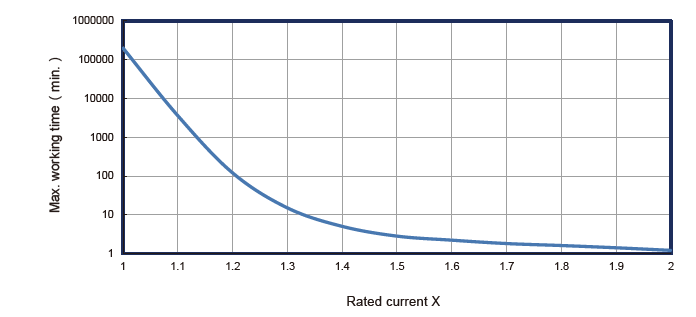
■ About Rated Current
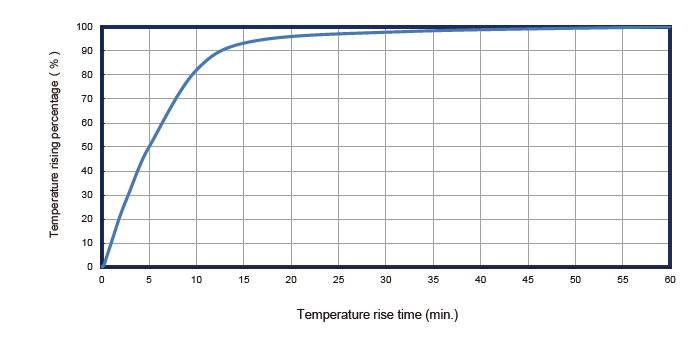
PM 스테퍼의 정격 전류는 열 특성에 의해 제한됩니다.
실제 적용에서 더 높은 출력 토크를 얻기 위해 정격 값을 확장하는 더 높은 전류를 공급할 수 있습니다. 이러한 경우 모터가 연속 작동할 수 없습니다.
그렇지 않으면 권선이 과열되어 장치가 손상될 수 있습니다. 듀티 사이클은 100%에 도달하지 않아야 하며 Max도 고려해야 합니다. 작업 시간 - 최대 톤.
■ 정격 전류의 배수로 듀티 사이클을 정의하는 방법

■ 최대 계산 방법. 정격 전류의 배수로 단일 작업 시간
■ 모터 권선 온도 상승 곡선