Intelligent Driver
다양한 모터를 하나의 드라이브로 컨트롤
-
-
Intelligent Driver
iPOS3604 BX / HX
컨트롤러와 드라이브가 하나의 장치에 결합되어 있고 다양한 종류의 모터를
하나의 드라이브로 컨트롤 할수 있음9~36V, 4A, 144W
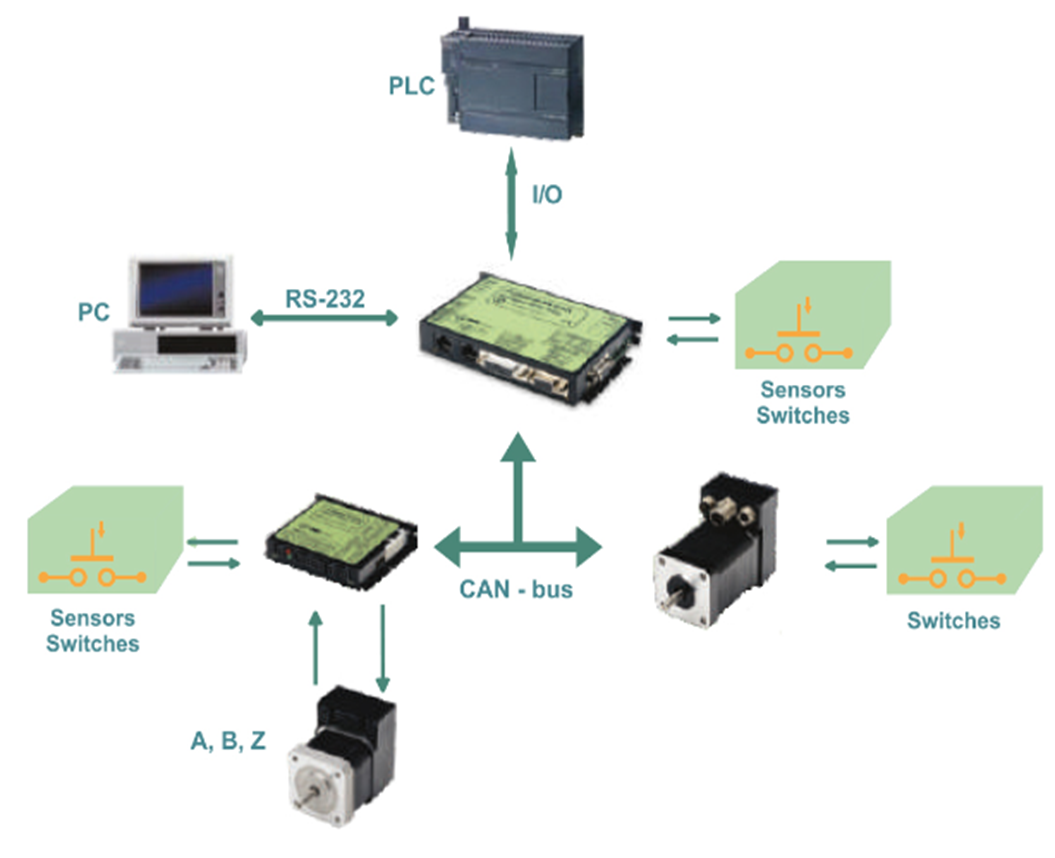
통신방법 : RS232, CAN/CANopen(표준) 또는 EtherCAT(옵션)을 통한 통신
커넥터위치: 사이드(BX 모델), 윗면(HX 모델)
개폐식 커넥터가 있는 폐쇄형 프레임 설계
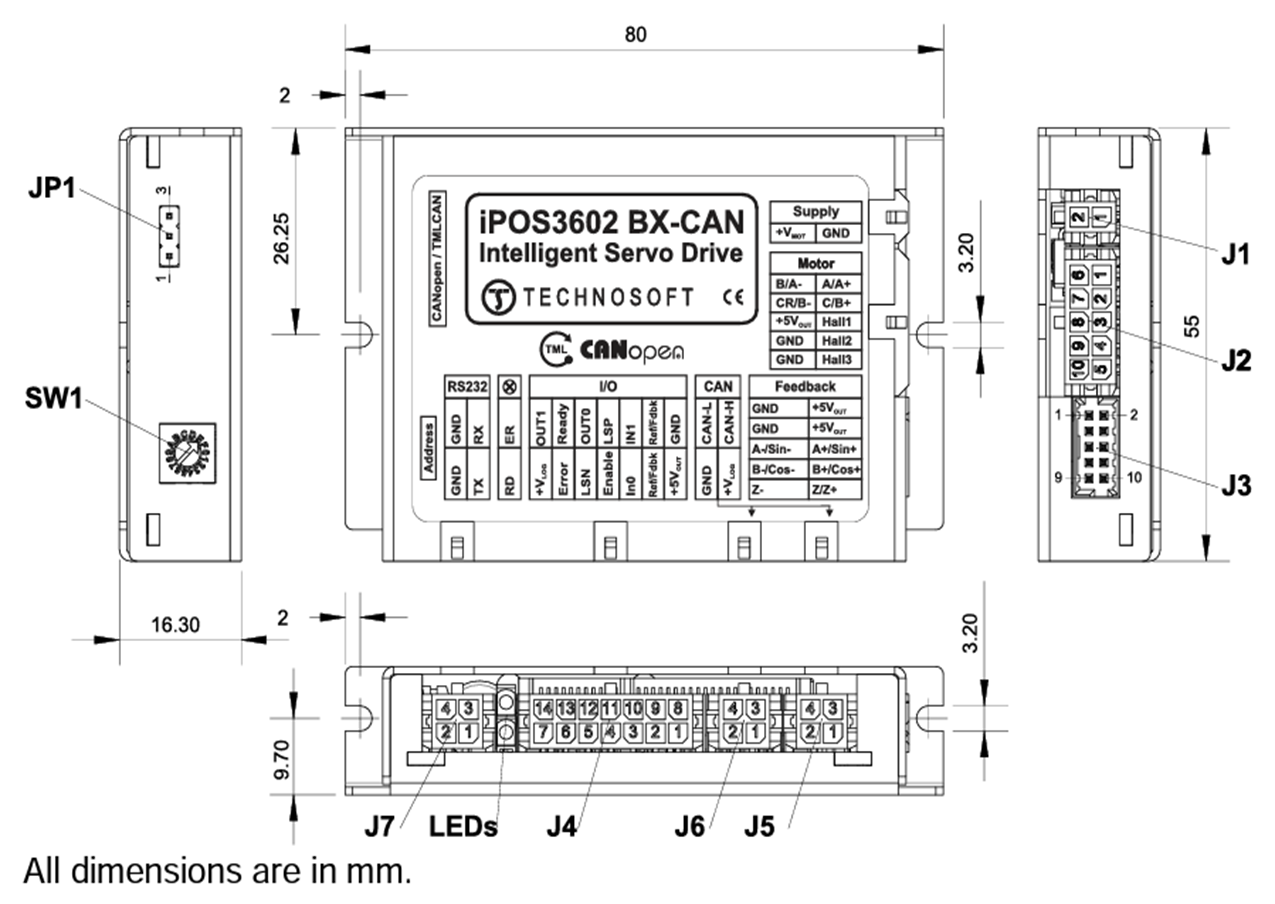
BX-CAN
집적도가 높고 DC 모터, PMSM/BLDC 모터 및 스텝 모터의 지능형 제어가 가능합니다..
iPOS3602 BX는 출력단, MotionChip™ 컨트롤러, I/O 신호 및 CAN 버스 인터페이스가 하나의 장치에 통합되어 매우 컴팩트하고
자유롭게 프로그래밍할 수 있는 서보 컨트롤러입니다. 컴팩트한 디자인으로 협소한 공간에도 설치할 수 있습니다.
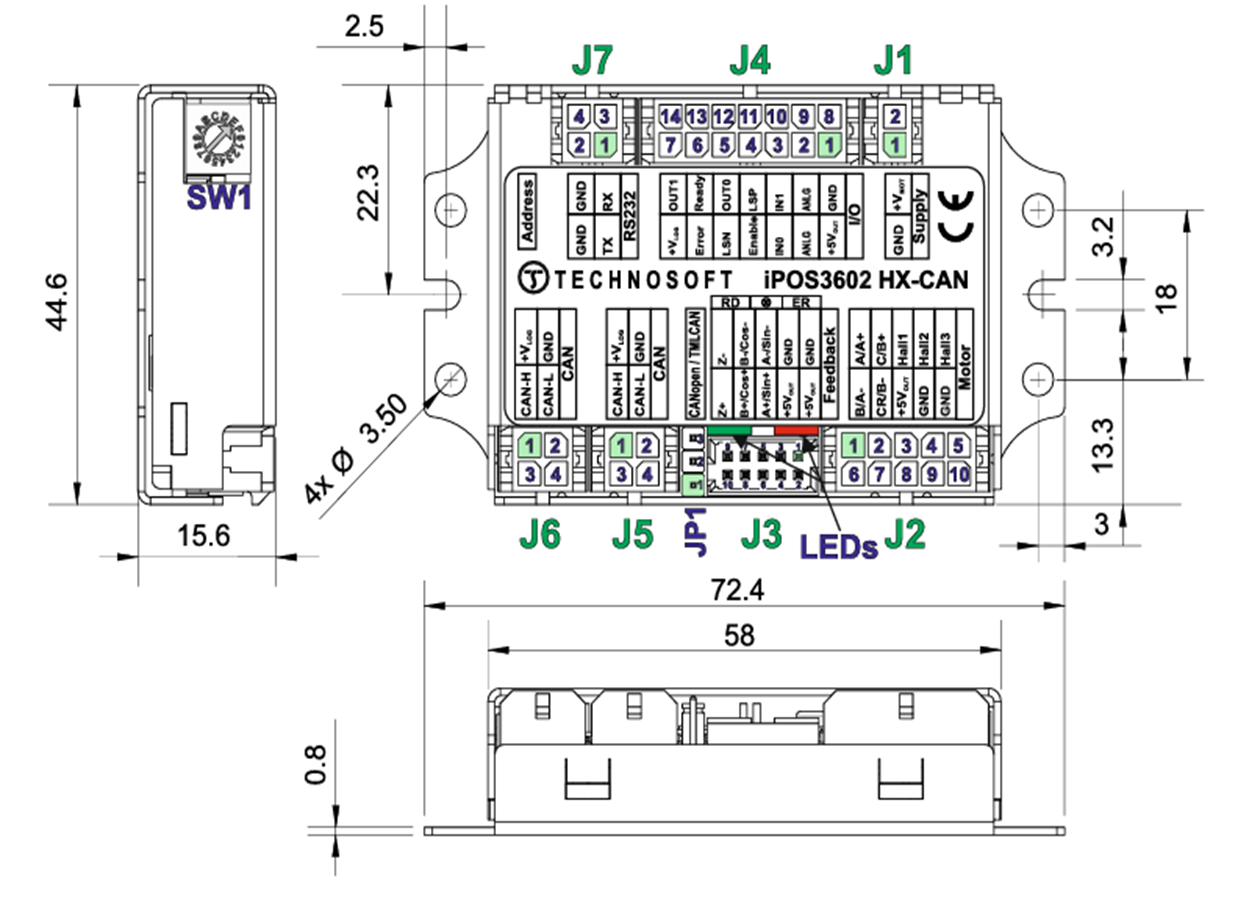
HX-CAN
최대 144W의 전력과 최대 36V의 전압으로 DC 모터, PMSM/BLDC 모터 및 스테퍼 모터를 제어하기 위한 비용 효율적인 범용 솔루션입니다.
iPOS3602 HX는 매우 컴팩트함에도 컨트롤러, Output stage 및 PLC 기능등의 필요한 모든요소를 하나의 장치에 포함합니다.
전기적 특성:
로직/전원 공급 전압: 9 - 36VDC
출력 전류: 연속 2A, 피크 전류 3.2A
모터 유형:
브러시리스 DC 모터(BLDC, PMSM 모터)
브러시 DC 모터(DC 모터)
스테퍼 모터( 2상 또는 3상)
slotless motor
Linear motor
피드백 옵션:
Incremental 엔코더
SinCos 1Vpp
디지털 홀 센서
아날로그 홀 센서
제어:
CAN 버스를 통해 펄스 및 방향 또는 아날로그/디지털 입력
드라이브의 비휘발성 메모리에 저장된 복잡한 모션 시퀀스의 자동 실행.
통신:
RS232 - 최대 115Kbit/s
CANopen - CiA profiles 301, 305 and 402
TMLCAN - Technosoft 독점 CAN 프로토콜
EtherNet - 추가 통신 모듈을 통한 옵션
디지털 및 아날로그 입력/출력:
5개의 디지털 입력: 5-36 V , NPN 또는 PNP 구성 가능
4개의 디지털 출력: 5-36V, 0.5A, NPN 오픈 컬렉터
1개의 아날로그 입력: 12비트, 0-5V
외부 모터/유지 브레이크 제어를 위한 디지털 출력 사용 가능
외부 브레이크 저항 제어를 위한 통합 브레이크 초퍼 기능
안전: 과전류, 과열, 저전압및 과전압, i2t(모터과열방지기능) 및 following Error(그것으로 인한 후속error) 의 보호.
i2t 기능 : 모터에 주입되는 과전류를 제한하여 과열로 인한 모터손상방지
축적된 열이 냉각 시스템의 기능을 초과하면 시스템이 열 한계에 도달하고 모터 또는 주변 요소가 영구적으로 손상될 수 있습니다.
모터 온도를 측정하는기능이 아니라 모터가 과열되는 것을 방지하는 기능
제어 기능:
인코더, 홀 센서 또는 센서리스를 통한 FOC(Field-Oriented Control)가 있는 사인파 정류.
사용자가 조절 가능한 샘플링 레이트와 최대 100KHz의 PWM 주파수릉 이용하여 빠르고 정확한 제어 루프 구조
샘플링 레이트 : 얼마만큼 많이 자주 샘플링하는 비율, 높을수록 많은정보를 확인할수 있음
2개의 BiQuad 필터를 동시에 사용하여 유연하게 공진 및 진동 억제.
인코더를 사용시 사인파 정류 및 FOC(Field-Oriented Control)가능한 Closed Loop구성가능
Open Loop에서 Full Step당 최대 512개의 마이크로스텝가능 (200 * 512 =102,400 pulse / 1회전)
부하단에 인코더를 사용할시 탈조 감지 및 자동 위치 보정. (Closed Loop)
작동 모드:
위치, 속도 및 토크 제어
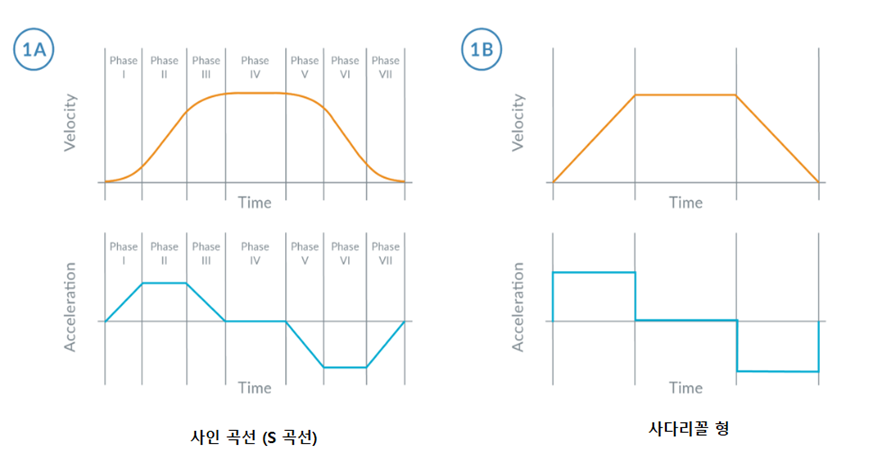
사다리꼴 및 사인 곡선 램프가 있는 경로 생성기
프로필 위치 모드, 속도 모드, 원점 복귀 모드
선형(PT) 및 입방 스플라인(PVT)이 있는 보간 위치
CSP(Cyclic Synchronous Position)
전자 기어(EGEAR) 및 캠(ECAM)
위치, 속도, 토크 또는 전압을 통한 모션 컨투어링
아날로그 외부 참조, 펄스 및 방향
EasyMotion Studio-Software:
단축 또는 다축 시스템에서 복잡한 시퀀스 프로그램의 간단한 시운전, 구성 및 로컬 프로그래밍을 위해서 편리한 마법사기능을 가진 그래픽 타입 프로그래밍 인터페이스.
Protection 컨트롤러 파라메타의 세팅뿐만 아니라 모터 타입 인코더 인터페이스 및 제어 방식을 선택할수 있습니다.
PID 컨트롤러 파라메타의 자동 결정(오토튜닝).
제어 패널, 로거(물리적DATA자동기록장치) 및 스코프 기능을 사용하여 폭넓은 분석 및 최적화 분석툴.
TML 라이브러리:
TML 모션 라이브러리는 Windows(32비트 및 64비트 버전 사용 가능) 또는 Linux 운영 체제에서 작동할 수 있으며
C/C++, C#, Visual Basic, Delphi Pascal 또는 LabVIEW로 개발된 애플리케이션에 포함될 수 있습니다.
TML_Lib는 PC에서 Technosoft 지능형 드라이브 및 모터를 제어할 수 있는 고급 기능 모음입니다.
프로토콜은 TML이며 통신은 RS232, CAN 버스, 이더넷 또는 USB를 통해 이루어질 수 있습니다.
Technosoft Motion Language(TML) 프로그래밍 언어:
TML 언어를 사용하여 다양한 작동 모드, 모션프로파일, 레퍼런스 운전 또는 복잡한 시퀀스 프로그램의 제어를 그래픽으로 프로그래밍하고
자율적으로 실행할 수 있습니다.드라이브 컨트롤러는 아날로그 및 디지털 I/O 신호를 처리하고 산술 및 논리 연산을 수행하며 축 간에 데이터와
명령을 교환할 수도 있습니다.
단일 축 및 다중 축 독립 실행형 애플리케이션은 복잡한 CANopen 또는 EtherCAT 마스터 컨트롤러를 사용하지 않고도 자체 생성된 시퀀스
프로그램으로 쉽게 구현할 수 있습니다.
MotionChip™ 기술:
모든 Technosoft 서보 컨트롤러의 주요 핵심은 MotionChip™입니다. 이는 복잡한 모션 제어 작업을 위해 특별히 설계된 지능적이고 자유롭게 프로그래밍
가능한 모션 컨트롤러입니다.
MotionChip™은 Texas Instruments의 강력한 디지털 신호 프로세서(DSP)를 독립적인 지능형 장치로 사용할 수 있는 가능성을 제공합니다.
그로인해 복잡한 마스터 제어의 많은 작업이 MotionChip™에 의해 직접 해결되어 기계의 전역 기능(global function)이 완화되고 마스터 애플리케이션의
관리가 최적화될 수 있습니다.
MotionChip ™에는 다양한 작동 모드, PLC 속성, 보호 및 안전 기능뿐만 아니라 다양한 인터페이스 및 모터 기술에 대한 지원이 가능하여 폭넓고 다양한
드라이브 시스템에서 유연하게 사용할 수 있습니다.
iPOS3602 BX-CAN
iPOS3602 HX-CAN
1
1
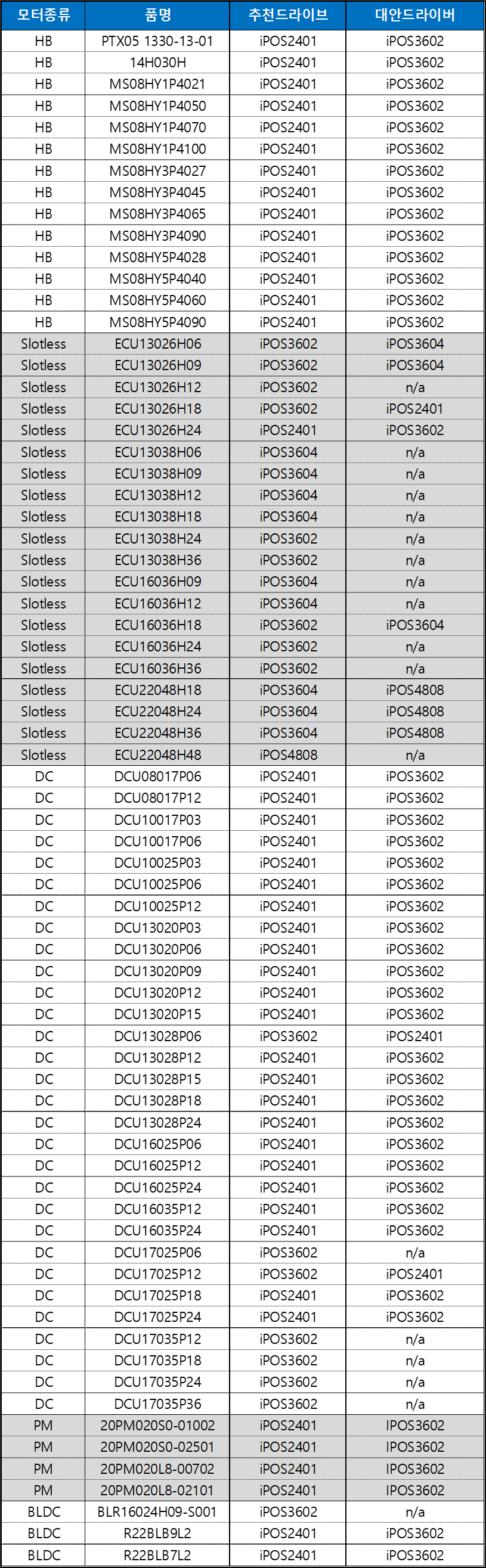
Recommended Motors and Drives Kit