
첨고자료-토크 속도 커브의 이해
- 작성일2022/08/08 16:58
- 조회 791
서보모터와 스텝모터의 개념이해
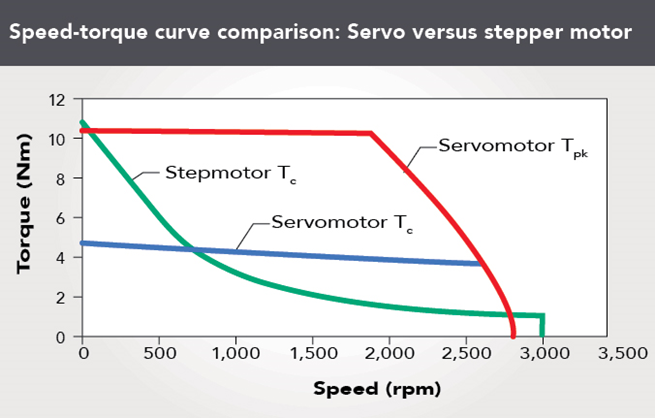
서보모터 (Servo motor) : 모터속도에 상관없이 일정한 토크값을 제공
속도가 빨라질수록 필요토크값은 커짐 (필요전류값이 증대)
드라이브 내부에서 일정한 토크값을 유지하도록 전류가 증대
스텝모터 (Step motor) : 모터속도에 반비례하는 토크값제공 (저속&고토크, 고속&저토크)
서보모터는 스텝모터보다 더 발전된 형태의 모터이며, 정밀한 제어에 많이 사용됩니다.
하지만 Holding Torque(H.T)는 스텝모터가 서보모터보다 더큽니다.
스텝모터는 정지상태가 움직이지 않는상태를 의미하나 서보모터는 정위치 (정지)에서 토크를낮추고
정위치를 유지할 만큼의 토크가 인가되며 좌우로 위치편차가 발생하면 토크가인가됩니다.
이것은 Hunting 현상이라고 부리며 이로인한 미세진동이 발생합니다.
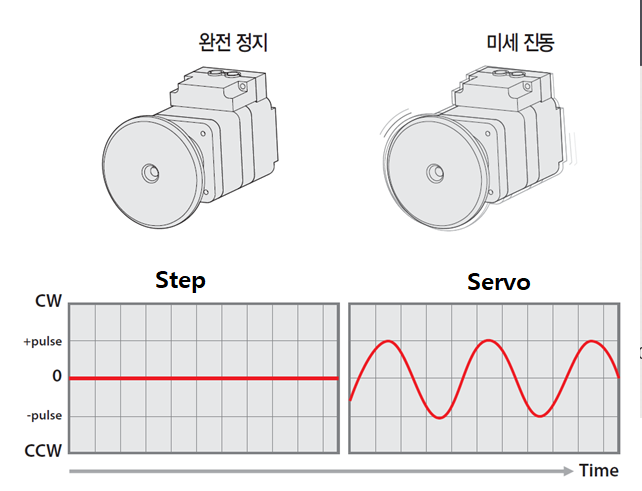
이에 따라 비젼 검사장비의 경우는 서보모터 보나는 Holding Torque 가 높은 스텝모터를 사용하게 됩니다.
스텝모터선정시, 최대 회전속도 와 부하토크를 계산하고, 그속도와 부하토크에 대응할수 있는 모터를 선정합니다.
- 가장 빠른 운전시 회전속도 파악
- 그때 필요한 부하토크 확인 (설계자통해 확인, 또는 부하토크계산
- 전율(150~300%) 적용한 필요토크 확인
- 모터사이즈 토크 커브 확인후 모터 선정
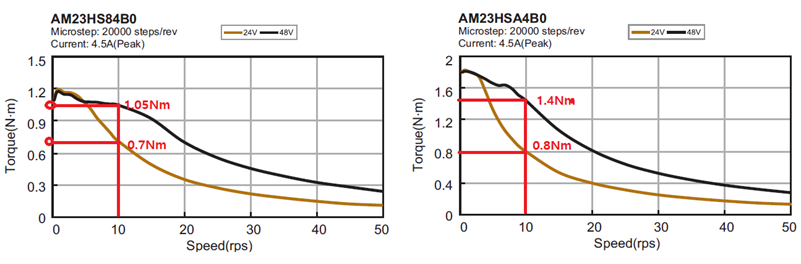
예제) 모터 속도 10rps, 부하토크 0.5Nm, 안전율 150% 적용 -> (0.5*1.5=0.75Nm)
AM23HS84B0 : 0.7Nm @ 10rps & 24V, 1.05Nm @ 10rps & 48V
AM23HSA4B0 : 0.8Nm @ 10rps & 24V 1.4Nm @ 10rps & 48V